关于用编程器刷路由器固件的问题这个固件既然是分享出来的,不改MAC的话直接刷入就是这个固件原本的mac,公网联网会有问题,内网使用是可以的,改mac的话可以用winhex工具修改,网上
abb机器人报警代码34316怎么维修
电脑
2024-08-28
ABB报警代码50501解决方法
1、报警代码:20032(转数计数器未更新)
报警原因:ABB机器人有个转数计数器,是用独立的电池供电,以记录各个轴的数据。如果示ABB教器提示电池电量过低,或者在断电情况下ABB机器人手臂位置移动了,这时候需要对转数计数器进行更新,否则机器人运行位置是不准的。
20032解决方案处理步骤:
①手动把ABB机器人各个轴停到机械原点,就是对齐各轴上的刻度线和对应的槽;
②在主菜单里点击“校准”-->点击“更新转数计数器”;
③依次点击更新各轴转数计数器(更新时,示教器不用Enable);
2、报警代码:38103(与SMB的通信中断)
38103解决方案:检查机器人控制柜下方的x2到机器人本体的SMB线是否接好。
3、报警代码:50057(关节未同步)
报警原因:此故障多数由于未正确关机导致。
50057解决方案:1、点击“重启”,选择“高级”,选择B启动,机器人将恢复到上一次正常状态。(正确关机方式不是直接断电,而是进入ABB,点击“重新启动”,然后选“高级”,再选择“关机”)
4、报警代码:50204(动作监控)或者50056(关节碰撞)
报警原因:ABB机器人发生碰撞(图中提示ABB机器人1轴可能发生碰撞),或者电机抱闸未打开。
50204/50056解决方法:如果确实发生了碰撞,可以先临时关闭碰撞监控,缓慢移动ABB机器人,脱离碰撞状态;
如果未发生碰撞,则检查接触板附近的K42、K43、K44上的抱闸控制线是否接通。
(关闭碰撞监控的步骤:在控制面板中点击“监控”,然后选择关闭手动操纵监控。)
5、报警代码:50296(SMB内存数据差异)
报警原因:更换了SMB或控制器卡,致使SMB内存数和控制柜数据不一致。
50296解决方案处理步骤:
1、在主菜单界面,选择需要校准的机械单元,点击“SMB内存”;
2、选择“高级”;
3、根据原因选择“清除控制柜内存”或“清除SMB内存”;
4、点击“关闭”返回后点击“更新…”;
5、根据原因选择“使用SMB内存数据更新控制柜”或“使用机柜数据更新SMB内存”;
6、重新更新转速计数器。
7、报警代码:34316(电机电流错误)
报警原因:驱动到对应电机的动力线未正确连接。
34316解决方法:根据示教器提示确认动力线连接错误的轴,然后调整动力线的连接。
(A41为驱动,X11为1轴输出,X12为2轴输出,以此类推)
8、报警代码:10106(维修时间提醒)
报警原因:ABB机器人智能周期保养维护提醒,用于提示用户对机器人进行必要的保养和检修。
10106解决方案步骤:完成对应的保养和检修后,要进行一个操作将保养与检修提示的计时复位,操作如下:
①在住菜单中点击“程序编辑器”-->调试-->调用例行程序…
②点击“ServiceInfo”-->转到;
③按住使能开关,然后按运行按键;
④选择对应要复位的计时对象,1是定期保养时间,2是操作时间,3是齿轮箱保养时间。这里选择1。
⑤选“RESET”,进行复位并且确认;
⑥点击"Exit" 退出-->点击"yes";
⑦你可以看到“Elapsed time”被复位为0了;
⑧在程序编辑器中点击"PP移至MAIN"选项。
报警提示10107、10108、10109、10110、10111、10112也是与ABB机器人维修相关,解决步骤跟10106相似。
9、报警代码:39504(制动器电源过载)
39504解决方案:对驱动单元、制动电源、动力电缆、控制模块、本体线缆、编码器线缆进行排查,找出损坏的部件进行更换。
abb工业机器人报警怎么解决?
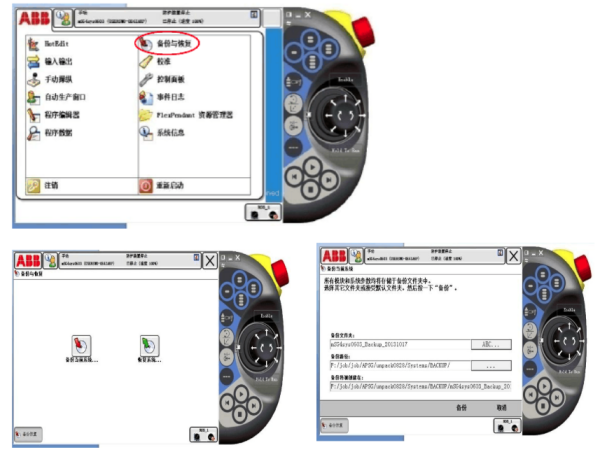
abb机器人报错时刻都需要为机器人进行备份处理的。
备份处理方式:
1、新机器第一次上电后。
2、在做任何修改之前。
3、在完成修改之后。
4、如果机器人重要,定期1周一次。
5、最好在U盘也做备份。
6、太旧的备份定期删除,腾出硬盘空间。
abb机器人套接字错误?
ABB机器人的套接字错误通常与机器人控制器上的网络通信有关。套接字错误可能是由于网络连接问题、通信协议错误或机器人控制器配置问题引起的。以下是一些处理ABB机器人套接字错误的常见步骤: 1. 检查网络连接: - 确保机器人和计算机或设备之间的网络连接正常工作。检查网络电缆、交换机、路由器等设备的状态。 - 确保IP地址、子网掩码和网关设置正确。 2. 检查机器人控制器配置: - 登录到机器人控制器的Web界面或使用RobotStudio等ABB机器人编程软件。 - 确保机器人的网络配置与计算机或设备的配置相匹配。特别注意IP地址和端口号。 - 验证机器人的通信协议设置,例如TCP/IP或UDPabb机器人自动停止已打开警报怎么消除?
摇杆被禁用一般有3种情况
1:在启动机器人时人为触动摇杆,启动后有时会出现摇杆禁用。重新启动机器人即可
2:摇杆控制精度出现偏移,需校准摇杆。
3:重启机器人的同时按住示教器的第四个快捷键和停止键。

ABB机器人紧急停止、自动停止等详情
ABB机器人系统可以配备各种各样的安全保护装置,例如门互锁开关、 安全光栅等,例如我们经常使用的护栏安全门锁,在机器人运行程序时,断开安全门锁可以使机器人停止,已保证人员的安全。ABB机器人提供的安全回路有如下4种:
AS(Auto Stop)自动停止:
自动停止只有在机器人自动运行模式下才会起作用。自动停止常用于在机器人自动运行时监控其附属安全装置的状态,如护栏安全门锁,安全光幕等等。
ES(Emer Stop)紧急停止:
一旦触发ES回路,无论机器人在何种运行模式下,都会立即停止,且在报警没有确认(松开急停,上电按钮上电)的情况下,机器人是无法启动继续运行的。ES建议只有在紧急的情况下再去使用,不正确使用会影响机器人的使用寿命。
GS(General Stop)常规停止:
GS在机器人的所有运行模式下都有效。只要触发GS,ABB机器人就无法上电。这个一般很少用,比如手动jog机器人时,如果配置了GS,真的感觉好麻烦。
SS(Superior Stop)上级停止:
SS主要用于与外部设备进行连接,如安全plc。在机器人任何运行模式下都有效。这个也一般很少用。
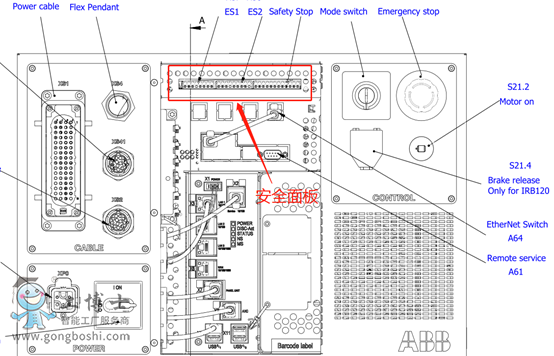
ES(Emer Stop)紧急停止:
将安全面板的X1与X2的第3脚与4脚的连接断,机器人就会进入紧急停止状态。ES1与ES2要分别单独接入无源NC常闭触点。ES1与ES2要同时使用。
AS(Auto Stop)自动停止:
将安全面板的X5的5脚与6脚、11脚与12脚的连接断开,机器人就会进入自动停止状态。AS1与AS2要分别单独接入无源NC常闭触点。AS1与AS2要同时使用。
IRC5 Compact紧凑型控制柜:
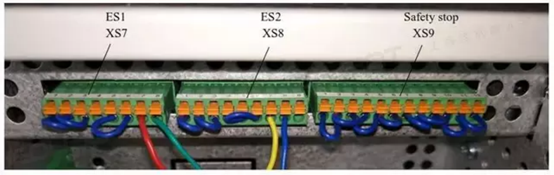
ES(Emer Stop)紧急停止:
将安全面板的XS7与XS8的第1脚与2脚的连接断,机器人就会进入紧急停止状态。ES1与ES2要分别单独接入无源NC常闭触点。ES1与ES2要同时使用。接线方式如下图所示:
AS(Auto Stop)自动停止:
将安全面板的XS9的5脚与6脚、11脚与12脚的连接断开,机器人就会进入自动停止状态。AS1与AS2要分别单独接入无源NC常闭触点。AS1与AS2要同时使用。
abb示教器开机弹窗
ABB机器人示教器数据线不能通讯维修、通电、内部有断线维修7、ABB机器人示教器上电无显示维修8、ABB机器人示教器操作手柄卡死维修,失灵完全不能使用维修9、ABB机器人数据线不能通讯或不能通电维修,内部有断路故障维修10、ABB机器人示教器无法进入系统故障维修11、ABB机器人示教盒无法启动故障维修。 欢迎来电咨询ABB机器人示教器维修、ABB机器人示教盒维修、ABB机器人教导盒维修、ABB机器人手柄维修咨询,上海恒税电气有限公司还可免费提供机器人备件使用,尽量不耽误客户生产工作。 服务优势:我公司有ABB机器人示教器维修专业的软件和硬件工程师配套服务,以及自主研发的ABB机器人示教盒测试平相关文章
- 详细阅读
- 详细阅读
-
MC的指令算不算编程?详细阅读
我的世界玩命令方块和编程有关系吗?有点相似,就是用特定的指令让指令方块做事,但是指令都是mc自己的,跟程序语言没关系数控编程中的MC指的是?MC指的是一个自动编程软件:MasterCAM
-
安徽理工大学带2018级计算机思维导详细阅读
有谁知道西安石油大学招生办王军老师的手机号码?王主任的电话谁敢公开啊?要是你分数线上了,应该没问题,打他电话没用,直接登录学校网站,打招生办电话吧安徽理工大学怎么样链接: 提
-
这面是一家新开的编程培训机构,有没详细阅读

一个刚办的教育培训机构,怎么可以快速招生?我认为招生主要的两个方向,一个是宣传招生。另一个就是转介绍了。对于我们学校来说,转介绍的来源占比更重,起码占到了60%。 1.服务好家
- 详细阅读
-
计算机发生蓝屏故障时,用户应注意收详细阅读

电脑蓝屏并出现你的电脑遇到问题需要重新启动,我们只收集这些错误信电脑蓝屏:又叫蓝屏死机(Blue Screen of Death,简称BSOD),是微软的 Windows 系列操作系统在无法从一个系统错误
-
Internet网中不同网络和不同计算机详细阅读

internet上各种网络和不同计算机间相互通信的基础是()协议internet上各种网络和不同计算机间相互通信的基础是TCP/IP协议。TCP/IP是因特网的正式网络协议,是一组在许多独立主机
-
请你根据国家2021年个人所得税的有详细阅读

2021年个人所得税计算方法2021年最新个人所得税计算方法:
1、在最近一个完整纳税年度,扣缴义务人每月代扣代缴同一单位工资、薪金的个人所得税,年薪、薪金不得超过6万元。累计 -
东莞哪家工厂急招cnc编程的?详细阅读

东莞那个镇招cnc最多您好,根据我的调查,东莞市中最招聘CNC技术人员的镇是东莞市长安镇。长安镇是东莞市最大的工业区之一,拥有众多的CNC加工厂,招聘CNC技术人员的企业也是最多的

