
以图片上蓝色小人为主角的手机游戏叫什么名字,不是疯狂喷气机,点击屏幕控制小人的重力这个应该是火柴人联盟吧,在游戏中也是老控制小人的呢,是一款休闲益智类的游戏,这个游戏最起
在实践应用中如何保障所示教的工具坐标系或用户坐标系在日常应用中不会发生偏移?发生
软件
2023-10-30
什么是用户坐标系在工业机器人编程中有什么作用?
用户坐标系(工件坐标)
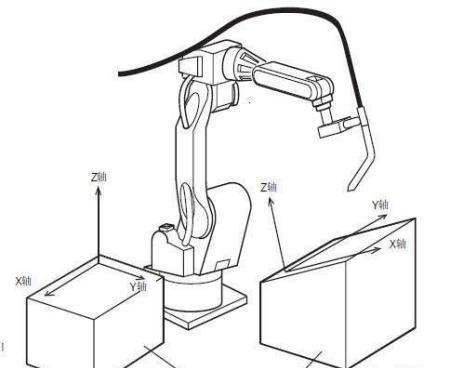
1.定义:用户坐标系定义在工件上,在机器人动作允许范围内的任意位置,设定任意角度的X、Y、Z 轴,原点位于机器人抓取的工件上,坐标系的方向根据客户需要任意定义。用户坐标也是可以设置多个。
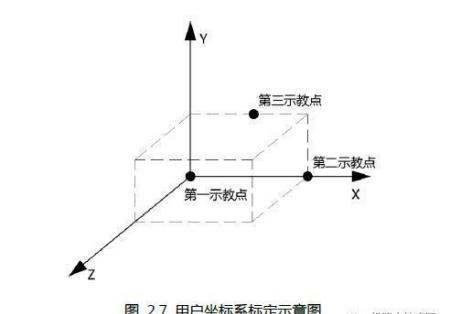
2.标定方法:用户坐标标定方法相对比较简单。一般通过示教3个示教点实现,第一个示教点是用户坐标系的原点;第二个示教点在X轴上,第一个示教点到第二个示教点的连线是X轴,所挃方向为X正方向;第三个示教点在Y轴的正方向区域内。Z轴由右手手法则确定。
机器人用三点法创建工件坐标时要注意什么事项?
三点法建立工件坐标,其实是建立了一个直角坐标系,是建立在一个平面上的,坐标系的Z轴是根据建立的坐标系自动生成的。所以要注意建立工件坐标系时,尽量使三个点是Z轴高度在一个平面上。相关文章
- 详细阅读
-
工业电子雷管的安全性是如何实现的详细阅读

工业电子雷管有哪几部分构成?电子雷管由以下A . 管壳B . 装药部分C . 电子电路三部分组成 电子雷管,又称数码电子雷管、数码雷管或工业数码电子雷管,即采用电子控制模块对起爆
-
VS2010+OpenCV如何调用大恒水星MER详细阅读

openCV进行大恒水星系列USB2.0工业相机视频读取opencv里面有获取摄像头的函数, IplImage *frame; CvCapture *capture=0;//摄像头结构 capture=cvCaptureFromCAM(-1);//获取
-
ABB机器人IRB2600示教过程中,不能走详细阅读
ABB机器人示教器报这个故障,操纵杆偏斜,表明其零时区出现问题,怎么处理,只能更换示教器了吗?可以校准一下试下,不行就只能更换示教器。 断电重启时同时按住示教器上的第四个快捷
-
有没有沈阳工业大学广告学的学生?这详细阅读
有没有沈阳工业大学广告学的学生?这个专业开设啥好玩的课程?听说有ps什么的,是真的吗?yes!沈阳工业大学广告学有ps课!上课特别好玩,可以用ps修图,做海报,甚至做菜单。老师会教你ps的
-
ABB机器人IRB4600功率是多少,我这边详细阅读

ABB机器人4600区别6轴机器人功率基本2.4~6kW。 ABB是全球领先的电力和自动化集团,总部设在瑞士。ABB集团业务遍布全球100多个国家,拥有120,000名员工。在中国的13,000名员工,在
-
为什么小谷云机器人没有二维码,找遍详细阅读
小谷机器人没有二维码怎么联网。可能你没有开通 Wi-Fi连接可能开通了移动网络。 按键上有WiFi图标的长按WiFi图标按键, 提示“网络配置中” 机身按键功能介绍首先介绍机器人
-
发那科机器人为什么连续运行和单步详细阅读
发那科机器人单步执行怎么切换指示灯为黄色时,机器人动作方式为单步动作通过操作示教器上“STEP〞按钮,可改变机器人动作方式。 指示灯有绿色和黄色两种状态。 FANUC公司创
-
目前中国出海人工智能服务公司有哪详细阅读

国内有哪些不错的医疗人工智能公司?国内不错的医疗人工智能公司有:1、天津御锦人工智能医疗科技有限公司:天津御锦人工智能医疗科技有限公司于2018年10月17日成立。法定代表人
-
您对 CAPTCHA 的响应似乎无效。请详细阅读

您对captcha的响应无效steam对CAPTCHA的响应无效的解决方法如下:电脑:华为笔记本。系统:win10。软件:steam2.3.12。1、如图所示,打开电脑,打开屏幕下角的“Windows”。2、如图所示