草图大师画的圆柱体怎么是这样的,还有这么多虚线,怎么解决?把风格里的隐藏几何体勾去掉即可
su隐藏的时候变成了方格怎么办原因:没有完全隐藏造成的。1、首先打开草图大师软件。
解析式惯导平台是如何建立惯性基准的
软件
2023-06-08
什么是惯性导航技术,惯性导航是如何实现的?
惯性导航是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标中,就能够得到在导航坐标中的速度、偏航角和位置等信息。但惯性导航系统由于陀螺仪零点漂移严重,车辆震动等因素,导致无法通过直接积分加速度获得高精度的方位和速度等信息,即现有的惯性导航系统很难长时间独立工作。
惯导模块是指采用GNSS(BDS/GPS系统联合定位)/INS组合导航定位技术,凭借高精度六轴惯性器件和成熟的惯性算法,无需里程计或速度信号接入,且无严格安装要求,即使在隧道、车库等弱信号环境下也能为车辆提供高精度的定位模块。
惯导模块SKM-4DX工作原理:
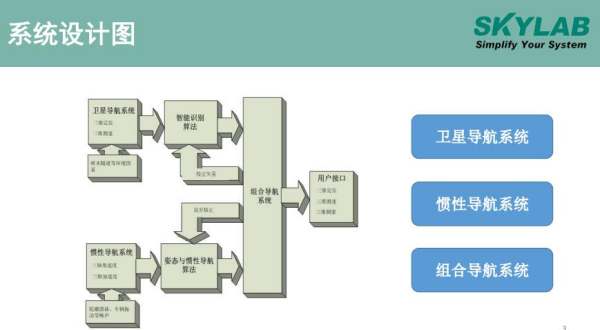
在车载导航中接入基于GNSS/INS组合导航定位的高性能车载组合惯导模块SKM-4DX,充分利用惯性导航系统和卫星导航系统优点,凭借高精度六轴惯性器件和成熟的惯性算法,无需里程计或速度信号接入,获得最优的导航结果;尤其是当卫星导航系统无法工作时,利用惯性导航系统使得导航系统继续工作,保证导航系统的正常工作,提高车载导航系统的稳定性和可靠性。
惯性导航的原理是什么?
惯性导航的基本工作原理:
以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度、角加速度,将它对时间进行一次积分,求得运动载体的速度、角速度,之后进行二次积分求得运动载体的位置信息,然后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。

应用
惯性导航及控制系统最初主要为航空航天、地面及海上军事用户所应用,是现代国防系统的核心技术产品,被广泛应用于飞机、导弹、舰船、潜艇、坦克等国防领域。随着成本的降低和需求的增长,惯性导航技术已扩展到大地测量、资源勘测、地球物理测量、海洋探测、铁路、隧道等商用领域,甚至在机器人、摄像机、儿童玩具中也被广泛应用。
捷联惯导系统的工作原理及特点
惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。 捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为数学平台,这是捷联惯导系统区别于平台式惯导系统的根本点。由于惯性元有固定漂移率,会造成导航误差,因此,远程导弹、飞机等武器平台通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位置参数。如采用指令+捷联式惯导、GPS+惯导(GPS/INS)。美国的战斧巡航导弹采用了GPS+INS +地形匹配组合导航。 惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。对捷联惯导系统而言,平台的作用和概念体现在计算机中,它是写在计算机中的方向余弦阵。直接安装在载体上的惯性元件测得相对惯性空间的加速度和角加速度是沿载体轴的分量,将这些分量经过一个坐标转换方向余弦阵,可以转换到要求的计算机坐标系内的分量。如果这个矩阵可以描述载体和地理坐标系之间的关系,那么载体坐标系测得的相对惯性空间的加速度和角速度,经过转换后便可得到沿地理坐标系的加速度和角速度分量,有了已知方位的加速度和角速度分量之后,导航计算机便可根据相应的力学方程解出要求的导航和姿态参数来。 捷联惯导系统和平台式惯导系统一样,能精确提供载体的姿态、地速、经纬度等导航参数。但平台式惯导系统结构较复杂、可靠性较低、故障间隔时间较短、造价较高,为可靠起见,通常在一个运载体上要配用两套惯导装置,这就增加了维修和购置费用。在捷联惯导系统中,由于计算机中存储的方向余弦解析参考系取代了平台系统以物理形式实现的参考系,因此,捷联惯导系统有以下独特优点。 (1)去掉了复杂的平台机械系统,系统结构极为简单,减小了系统的体积和重量,同时降低了成本,简化了维修,提高了可靠性。 (2)无常用的机械平台,缩短了整个系统的启动准备时间,也消除了与平台系统有关的误差。 (3)无框架锁定系统,允许全方位(全姿态)工作。 (4)除能提供平台式系统所能提供的所有参数外,还可以提供沿弹体三个轴的速度和加速度信息。 但是,由于在捷联惯导系统中,惯性元件与载体直接固连,其工作环境恶劣,对惯性元件及机(弹)载计算机等部件也提出了较高的要求。 (1)要求加速度表在宽动态范围内具有高性能、高可靠性,且能数字输出。 (2)因为要保证大攻角下的计算精度,对计算机的速度和容量都提出了较高的要求。
惯性导航的原理
惯性导航是综合了机电、光学、数学、力学、控制及计算机等学科的尖端技术。惯性是指惯性器件即陀螺仪和加速计,其中陀螺仪用来测量运载体的角速度,加速计用来测量运载体的加速度。导航是指确定运载体的位置、航向及姿态。惯性导航系统是指将敏感器件如陀螺仪和加速计数据视为导航参数的解算系统,该系统根据陀螺的输出建立起导航坐标系,根据加速计输出解算出运载体的速度和位置。 这些都是理论的一些知识,有些公司就基于以上理论开发出了一些产品。国外的代表公司有Honeywell、SEER Technology,定位精度基本上为2%-5%,也就是说用户行走1km,位置误差为20米,这是无法满足实际应用需求的,会延误逃生、救惯性导航中的初始对准是什么意思,有什么作用?
惯导系统在进入导航工作状态之前都需要建立初始基准,如控制平台旋转使得平台坐标系与导航坐标系重合,这种建立初始基准的过程称为惯导系统的初始对准。相关文章
-
草图大师,一画了圆柱体后,使用【直线详细阅读

-
如何在多御浏览中设定MD5加密解密详细阅读

如何使用MD5验证工具使用MD5验证工具的方法:
1、运行MD5校验工具,点击”浏览”选项,可以浏览添加需要校验的软件,镜像或视频文件等;
2、打开搜索一个镜像,下载该软件的文件系统信 -
华大csp工具驱动下载详细阅读

求大连华大-csp工具下载地址,就那个农行的在农业银行的“证书向导”页面可以下载http://www.abchina.com/cn/hq/abc/zsxd/index.jsp/zsxd=zsxz/index.html 点击“客户端软件
-
使用QQ或微信等社交工具过程中会留详细阅读

在使用微信、QQ等社交工具时,应避免什么?应该避免不要透露自己的隐私。不要随意点开别人给你发的链接,以免造成不必要的财产损失,在转账发红包之类的时候要警惕多次确认有没有
-
为什么360导航页面变成灰色的详细阅读
123和360网址导航网页突然变成了灰色的。小A报有特洛依木马...灰色是因为今天是哀悼日. 如果你想变会彩色,可以.还是算了,还有两个小时就变回来了. 忍忍. 木马是你上的网的
-
一个社交通讯工具要多少钱?详细阅读

开发一个即时聊天工具大概需要多少钱?一般普通的5万以内,如果是比较复杂的社交APP的话大概在5-100万左右,甚至更多。百度想要开发一个社交聊天app,需要多少钱?几万到几十万不
-
为了防止主电路某些短路故障应在pl详细阅读

如何提高PLC系统的可靠性PLC由于具有功能强、程序设计简介,维护方便等优点,特别是高可靠性、较强的适应恶劣工业环境的能力,目前广泛应用于机械、冶金、化工、轻工、电力、汽车
-
EXCEL中开发工具数值调节按钮的属详细阅读

Excel英文的界面怎么改成中文的啊?1、点击电脑左下角的开始菜单,找到office软件,我们可以看到“office工具”。2、点开office工具,可以看到office语言设置,我们点击打开语言设置
-
可以基于多期追踪数据,使用cox回归详细阅读

请问Cox回归分析是什么意思?cox回归是做生存分析的一个半参数模型,目的是找出影响生存的危险因素有哪些,在医学中常用于肿瘤和其他疾病的预后分析.常用的统计软件如SAS和spss都
-
CDR2020版本度量尺寸工具在哪里找?详细阅读

cdr2020量尺工具在哪?一般的度量工具都在工具箱中,仔细看看工具箱隐藏的地方。cdr怎么把度量工具调出来1、首先打开CorelDRAWX8软件,并载入绘制好的一个图标样例:2、然后在左侧